Historia de la Lógica Transcursiva (Capítulo 50)
Cuaderno II (páginas 297 a 302)
Continuamos con los Bond Graph (BG). Veremos las fuentes de esfuerzo y flujo: un puerto activo es aquel que da reacción a la fuente. Por ejemplo, si caminamos sobre un cuerpo rígido, nuestros pies reaccionan con una fuerza o fuente. Por esta razón, las fuentes son llamadas: puertos activos. La fuerza es considerada como una fuente de 'esfuerzo', y la superficie del cuerpo rígido da la fuente de velocidad (flujo).
Elementos básicos de dos puertos: hay dos tipos de elementos de dos puertos, llamados: transformador (TF) y girador (GY), respectivamente.
El transformador: un TF BG puede representar un transformador eléctrico ideal, una palanca sin masa, etc. El TF no crea, solo almacena o destruye energía. Él conserva potencia y transmite el factor de potencia con una escala propia, como la definida por el 'módulo del transformador' (ver luego).
La idea de TF se puede entender mejor si consideramos el siguiente ejemplo: consideremos una palanca ideal, sin masa. También se supone que la palanca es rígida, con lo cual se puede establecer una relación lineal entre las variables de potencia en ambos extremos de la palanca. (figura)
 Desde la geometría tenemos: V₂ = (b/a). V₁
Desde la geometría tenemos: V₂ = (b/a). V₁
La transmisión de potencia implica:
F₂ = (a/b). F₁, para que: V₂F₂ = V₁F₁
En BG, la situación se representa a la derecha. La r arriba del TF (en la ecuación derecha, de la figura), denota el 'módulo' de TF, el cual debe ser una constante o cualquier expresión (tipo 'b/a'). La flecha pequeña indica el sentido en el que se usa el módulo: fᴶ = rfᵢ, y eᴶ = (1/r) eᵢ. Luego, la siguiente expresión establece la conservación de potencia (energía): eᴶfᴶ = eᵢfᵢ.
El girador: un transformador relaciona flujo con flujo, y esfuerzo con esfuerzo. Por el contrario, un girador (GY) establece una relación entre flujo y esfuerzo, y esfuerzo y flujo; conservando, de nuevo, la potencia en los mismos puertos. El más simple de los giradores es el giróscopo mecánico. (figura)
 Una fuerza vertical crea un movimiento adicional en dirección horizontal y para mantener el movimiento vertical, se necesita la fuerza horizontal. Luego, la fuerza es transformada en flujo, y el flujo es transformado en fuerza, con cierta constante de proporcionalidad. En este ejemplo, Izz indica el momento de inercia sobre el eje z. Wx, Wy, y Wz, indican la velocidad angular sobre los respectivos ejes; Tx, Ty, y Tz, representan el torque actuando sobre el eje correspondiente. Tx = Izz.Wz.Wy.
Una fuerza vertical crea un movimiento adicional en dirección horizontal y para mantener el movimiento vertical, se necesita la fuerza horizontal. Luego, la fuerza es transformada en flujo, y el flujo es transformado en fuerza, con cierta constante de proporcionalidad. En este ejemplo, Izz indica el momento de inercia sobre el eje z. Wx, Wy, y Wz, indican la velocidad angular sobre los respectivos ejes; Tx, Ty, y Tz, representan el torque actuando sobre el eje correspondiente. Tx = Izz.Wz.Wy.
La transmisión de potencia implica: Ty = Izz.Wz.Wx, para que, Tx.Wx = Ty.Wy.
La μ arriba del GY (en la ecuación de la derecha, de la figura), denota el módulo del GY, donde
μ = Izz.Wz. Este módulo no tiene un sentido de dirección asociado a él, y siempre es definido desde el flujo al esfuerzo. eᴶ = μfᴶ, eᵢ = μfᵢ. Luego, la siguiente expresión establece la conservación de potencia: eᵢfᵢ = eᴶfᴶ.
En el dominio eléctrico, un motor de corriente continua ideal es representado como un GY, donde el torque (e) de salida es proporcional a la corriente de entrada, y la f.e.m (f) es proporcional a la velocidad angular del motor. En general, los GY son usados en la mayoría de los casos donde la potencia de un dominio de energía es transferido a otro, a saber: eléctrica → rotacional;
eléctrica → magnética; e hidráulica → rotacional.
Elementos de tres puertos de unión: el nombre de 3 puertos usado para las uniones es un nombre equivocado. En efecto, las uniones pueden conectar 2 o más lazos (bonds). Hay solo dos de estos tipos de unión: 0 y 1. Ellas conservan la energía y son reversibles. Representan, simplemente, la topología del sistema y por tanto, la capa subyacente de uniones y los elementos de dos puertos, en un modelo completo; también llamados 'estructura de unión', son conservadores de energía.
Las uniones ⓵: tienen igualdad en la suma de flujos y esfuerzos a 0, con la misma orientación de potencia. También son llamados tipo S, según la vieja nomenclatura. Estas uniones representan un punto de masa común, en un sistema mecánico; una serie de conexiones (con igual flujo de corriente en todos los elementos) en una red eléctrica, cañerías hidráulicas; y otros representantes de continuidad de flujo. Dos de tales uniones se pueden ver en la figura que sigue:
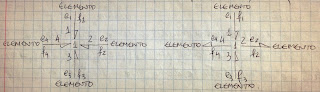 Usando la convención de 'signo de potencia interno', la relación constitutiva (para la conservación de la potencia en las uniones), para el caso de la figura, podríamos escribir lo siguiente: e₁f₁+e₂f₂+e₃f₃+e₄f₄ = 0
Usando la convención de 'signo de potencia interno', la relación constitutiva (para la conservación de la potencia en las uniones), para el caso de la figura, podríamos escribir lo siguiente: e₁f₁+e₂f₂+e₃f₃+e₄f₄ = 0
Como la unión 1 es una unión 'igualadora' de flujo: f₁ = f₂ = f₃ = f₄. Esto conduce a:
e₁+e₂+e₃+e₄ = 0. Consideremos ahora el gráfico de la derecha: la relación constitutiva sería:
e₁f₁ - e₂f₂ + e₃f₃ - e₄f₄ = 0, y f₁ = f₂ = f₃ = f₄. Por tanto, e₁ - e₂ + e₃ - e₄ = 0.
Por tanto, una unión ⓵ está gobernada por las siguientes reglas: el flujo de los elementos asociados a una unión ⓵ son iguales y la suma algebraica del esfuerzo = cero. El signo de la suma algebraica está determinado por la dirección de la 'media flecha' en el gráfico.
Las uniones ⓪: tienen igualdad de esfuerzos, mientras que los flujos suman cero; si la orientación de las potencias es como positiva hacia la unión. Esta unión también puede ser nombrada como P. Representa uniones mecánicas, puntos nopales eléctricos y puntos de distribución de presión hidráulica o punto pascaliano. (figura)
 En el modelo de la izquierda, la relación constitutiva es : e₁f₁+e₂f₂+e₃f₃+e₄f₄ = 0
En el modelo de la izquierda, la relación constitutiva es : e₁f₁+e₂f₂+e₃f₃+e₄f₄ = 0
Mientras que , el modelo de la derecha está gobernado por la siguiente relación:
e₁f₁ - e₂f₂ + e₃f₃ - e₄f₄ = 0.
Como la unión ⓪ es una unión que iguala el esfuerzo e₁ = e₂ = e₃ = e₄. O sea: f₁ + f₂ + f₃+ f₄ = 0
y f₁ - f₂ + f₃ - f₄ = 0, para los modelos de la izquierda y derecha, respectivamente.
Por tanto, las uniones ⓪ están gobernadas por las siguientes reglas: el esfuerzo sobre los elementos asociados a la unión ⓪ son iguales y la suma algebraica de los flujos es cero. El signo de suma algebraica está determinado por la dirección de la 'media flecha' en los BG.
¡Nos vemos mañana!
Continuamos con los Bond Graph (BG). Veremos las fuentes de esfuerzo y flujo: un puerto activo es aquel que da reacción a la fuente. Por ejemplo, si caminamos sobre un cuerpo rígido, nuestros pies reaccionan con una fuerza o fuente. Por esta razón, las fuentes son llamadas: puertos activos. La fuerza es considerada como una fuente de 'esfuerzo', y la superficie del cuerpo rígido da la fuente de velocidad (flujo).
Elementos básicos de dos puertos: hay dos tipos de elementos de dos puertos, llamados: transformador (TF) y girador (GY), respectivamente.
El transformador: un TF BG puede representar un transformador eléctrico ideal, una palanca sin masa, etc. El TF no crea, solo almacena o destruye energía. Él conserva potencia y transmite el factor de potencia con una escala propia, como la definida por el 'módulo del transformador' (ver luego).
La idea de TF se puede entender mejor si consideramos el siguiente ejemplo: consideremos una palanca ideal, sin masa. También se supone que la palanca es rígida, con lo cual se puede establecer una relación lineal entre las variables de potencia en ambos extremos de la palanca. (figura)

La transmisión de potencia implica:
F₂ = (a/b). F₁, para que: V₂F₂ = V₁F₁
En BG, la situación se representa a la derecha. La r arriba del TF (en la ecuación derecha, de la figura), denota el 'módulo' de TF, el cual debe ser una constante o cualquier expresión (tipo 'b/a'). La flecha pequeña indica el sentido en el que se usa el módulo: fᴶ = rfᵢ, y eᴶ = (1/r) eᵢ. Luego, la siguiente expresión establece la conservación de potencia (energía): eᴶfᴶ = eᵢfᵢ.
El girador: un transformador relaciona flujo con flujo, y esfuerzo con esfuerzo. Por el contrario, un girador (GY) establece una relación entre flujo y esfuerzo, y esfuerzo y flujo; conservando, de nuevo, la potencia en los mismos puertos. El más simple de los giradores es el giróscopo mecánico. (figura)

La transmisión de potencia implica: Ty = Izz.Wz.Wx, para que, Tx.Wx = Ty.Wy.
La μ arriba del GY (en la ecuación de la derecha, de la figura), denota el módulo del GY, donde
μ = Izz.Wz. Este módulo no tiene un sentido de dirección asociado a él, y siempre es definido desde el flujo al esfuerzo. eᴶ = μfᴶ, eᵢ = μfᵢ. Luego, la siguiente expresión establece la conservación de potencia: eᵢfᵢ = eᴶfᴶ.
En el dominio eléctrico, un motor de corriente continua ideal es representado como un GY, donde el torque (e) de salida es proporcional a la corriente de entrada, y la f.e.m (f) es proporcional a la velocidad angular del motor. En general, los GY son usados en la mayoría de los casos donde la potencia de un dominio de energía es transferido a otro, a saber: eléctrica → rotacional;
eléctrica → magnética; e hidráulica → rotacional.
Elementos de tres puertos de unión: el nombre de 3 puertos usado para las uniones es un nombre equivocado. En efecto, las uniones pueden conectar 2 o más lazos (bonds). Hay solo dos de estos tipos de unión: 0 y 1. Ellas conservan la energía y son reversibles. Representan, simplemente, la topología del sistema y por tanto, la capa subyacente de uniones y los elementos de dos puertos, en un modelo completo; también llamados 'estructura de unión', son conservadores de energía.
Las uniones ⓵: tienen igualdad en la suma de flujos y esfuerzos a 0, con la misma orientación de potencia. También son llamados tipo S, según la vieja nomenclatura. Estas uniones representan un punto de masa común, en un sistema mecánico; una serie de conexiones (con igual flujo de corriente en todos los elementos) en una red eléctrica, cañerías hidráulicas; y otros representantes de continuidad de flujo. Dos de tales uniones se pueden ver en la figura que sigue:

Como la unión 1 es una unión 'igualadora' de flujo: f₁ = f₂ = f₃ = f₄. Esto conduce a:
e₁+e₂+e₃+e₄ = 0. Consideremos ahora el gráfico de la derecha: la relación constitutiva sería:
e₁f₁ - e₂f₂ + e₃f₃ - e₄f₄ = 0, y f₁ = f₂ = f₃ = f₄. Por tanto, e₁ - e₂ + e₃ - e₄ = 0.
Por tanto, una unión ⓵ está gobernada por las siguientes reglas: el flujo de los elementos asociados a una unión ⓵ son iguales y la suma algebraica del esfuerzo = cero. El signo de la suma algebraica está determinado por la dirección de la 'media flecha' en el gráfico.
Las uniones ⓪: tienen igualdad de esfuerzos, mientras que los flujos suman cero; si la orientación de las potencias es como positiva hacia la unión. Esta unión también puede ser nombrada como P. Representa uniones mecánicas, puntos nopales eléctricos y puntos de distribución de presión hidráulica o punto pascaliano. (figura)

Mientras que , el modelo de la derecha está gobernado por la siguiente relación:
e₁f₁ - e₂f₂ + e₃f₃ - e₄f₄ = 0.
Como la unión ⓪ es una unión que iguala el esfuerzo e₁ = e₂ = e₃ = e₄. O sea: f₁ + f₂ + f₃+ f₄ = 0
y f₁ - f₂ + f₃ - f₄ = 0, para los modelos de la izquierda y derecha, respectivamente.
Por tanto, las uniones ⓪ están gobernadas por las siguientes reglas: el esfuerzo sobre los elementos asociados a la unión ⓪ son iguales y la suma algebraica de los flujos es cero. El signo de suma algebraica está determinado por la dirección de la 'media flecha' en los BG.
¡Nos vemos mañana!